Tape Model



|
Tape Model |
|
Based on the string model, Robinson formulated the so-called tape model in 1975. This model reduces the shift of a muscle's path on the globe by the introduction of an angle reduction in secondary and tertiary gaze positions. Thus, the movement of the point of tangency on the globe is described by a linear, eye position-dependent value. Due to this modification, the muscle action circles of the string and the tape model do not coincide anymore. Only in primary position the muscle action circle forms a great circle on the globe in both models, since the angle reduction only has an effect in gaze positions different from the primary position. In all other gaze positions, the muscle action circle is a small circle on the globe, whose center does no longer coincide with the rotation center of the globe. The definition of the muscle action now also includes the point of tangency, leading to a clear change in model prediction.
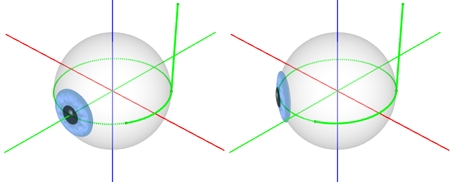
Muscle Path of the Tape Model in Primary (Left) and Secondary Gaze Position (Right)
Limiting the movement of the point of tangency reduces the muscle shift in secondary and tertiary positions. The figure shows this effect for the lateral rectus muscle of a left eye in primary position and after an adduction of 35°. Nevertheless, the model predictions are not satisfying compared to clinical measurements.