String Model



|
String Model |
|
The string model is the simplest representation in order to describe the geometrical effect of eye rotations. It was formulated by Krewson in 1950. According to the string model, a muscle is assumed as a thin string with an insertion on the globe and an origin located in the posterior end of the orbita. Krewson assumed that the strings are always pulled tight and therefore the muscle path is the shortest path between origin and insertion.
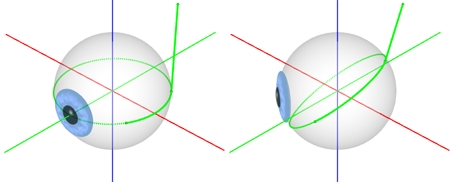
Muscle Path of the String Model in Primary (Left) and Secondary Gaze Position (Right)
Since the muscle path in this model describes the shortest path from origin to insertion, the circle that describes the muscle action on the globe always forms a great circle (muscle action circle, see figure). This makes the calculation of the point of tangency much easier.
Using the string model, model predictions hardly correspond to clinical expectations, especially in secondary and tertiary gaze positions. Only in primary position the string model provides acceptable predictions for muscle path and muscle action. The left part of the above figure shows a left eye with the lateral rectus muscle in primary position, whereas the right part shows an adduction of 35° (secondary gaze position). It is easy to see that the path of the lateral rectus muscle "shifts" upwards as the eye looks into adduction, which does not correspond to clinical observations. This shift results in a drastic change of the muscle path and thus in an abnormal rotation of the eye (the lateral rectus muscle suddenly becomes an elevator!). The lateral rectus muscle cannot keep its mainly abducting effect on the globe, it "slips" away as the eye turns towards the nose.